Upcoming Events:
Error 406 - Not Acceptable
Generally a 406 error is caused because a request has been blocked by Mod Security. If you believe that your request has been blocked by mistake please contact the web site owner.
Full event list
Error 406 - Not Acceptable
Generally a 406 error is caused because a request has been blocked by Mod Security. If you believe that your request has been blocked by mistake please contact the web site owner.
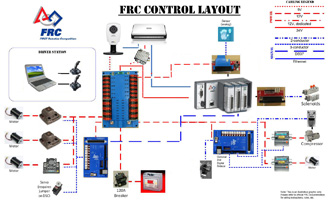
FIRST® Robotics Competition (FRC®)
Control System 2009-2014
This robot control system is built around a PowerPC-based cRIO made by National Instruments (NI), custom FRC electronics, and a standard WiFi setup controlled from a standard PC netbook or laptop.
Overview
Components & Layouts
Control System Components |
Control System Layouts |
Programming
Check out FIRST Forge where FIRST community software projects, both official and unofficial, are hosted Ð start/share your own project.
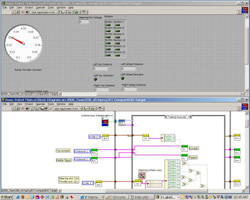
LabVIEW Programming |
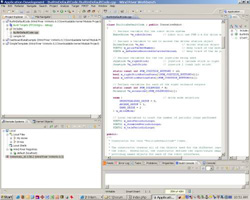
C++/Wind River |
Java/NetBeans |
Troubleshooting
There's a special Troubleshooting Page for that!First Stop - Driver Station Log
Driver Station LogDriver Station Log Format
IP Network Management
We may use several different computer network topologies during the season:- Competition field
- Competition pits
- At home in the shop
- Demos in the community
- Off-season events
Here are some suggested variations in IP network topologies that teams might find useful: Robot IP Network Variations

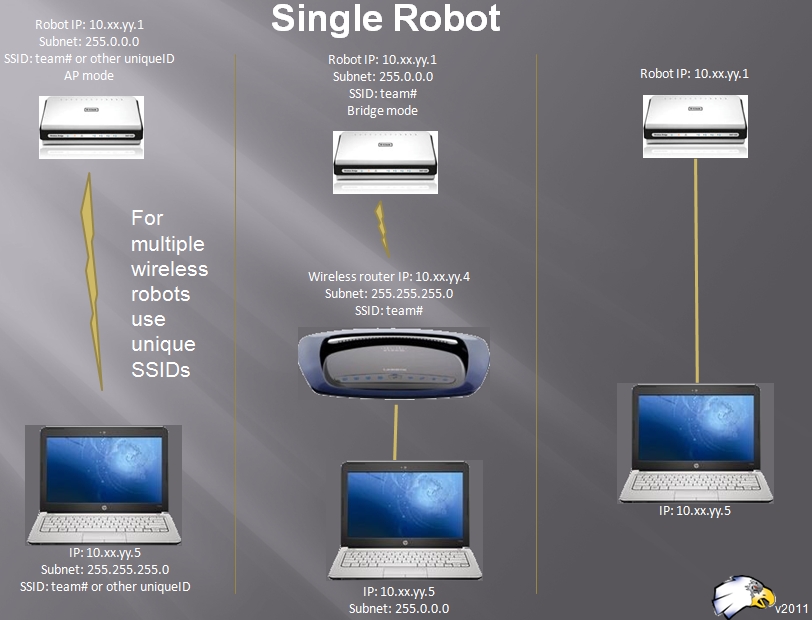
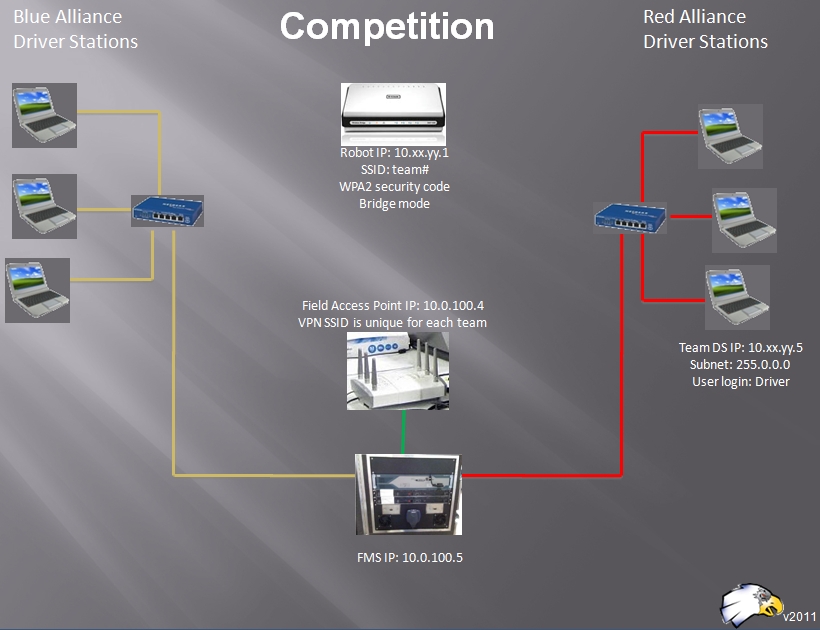
Competition Field
Just some background on how the competition field electronics are setup for the curious minds of people who are interested in that sort of thing.
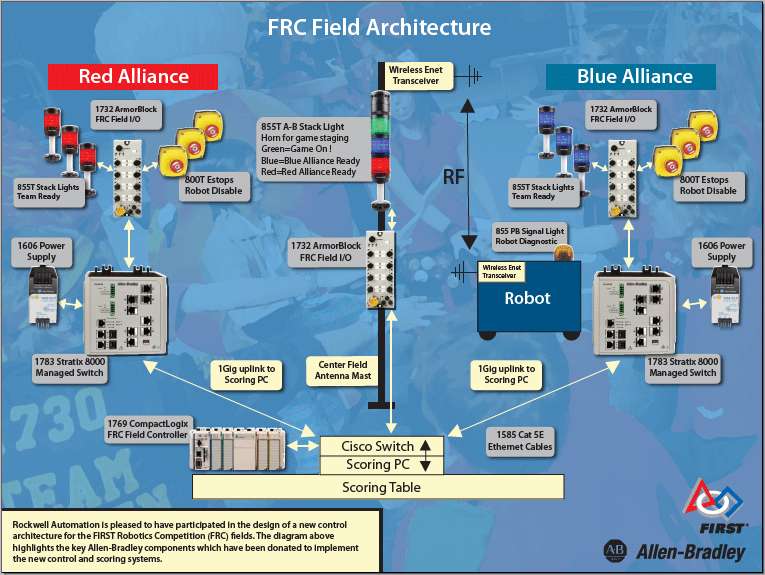
2011 FRC Field Electronics Manual
Off-season Field Setup
- Requesting an official FIRST playing field (field manuals too)
- FMS Software Descriptions
If you have an FTA on call for your off-season competitions and you use an official field then FIRST will send you the standard Field Management System electronics, including match schedule generation, the scoring system and field control. It will use FMS Delta, a reduced feature set version of the typical FMS software.
However, if you do not have an FTA or you do not use an official FIRST playing field, then you have to put together your own field control, scoring system, etc.
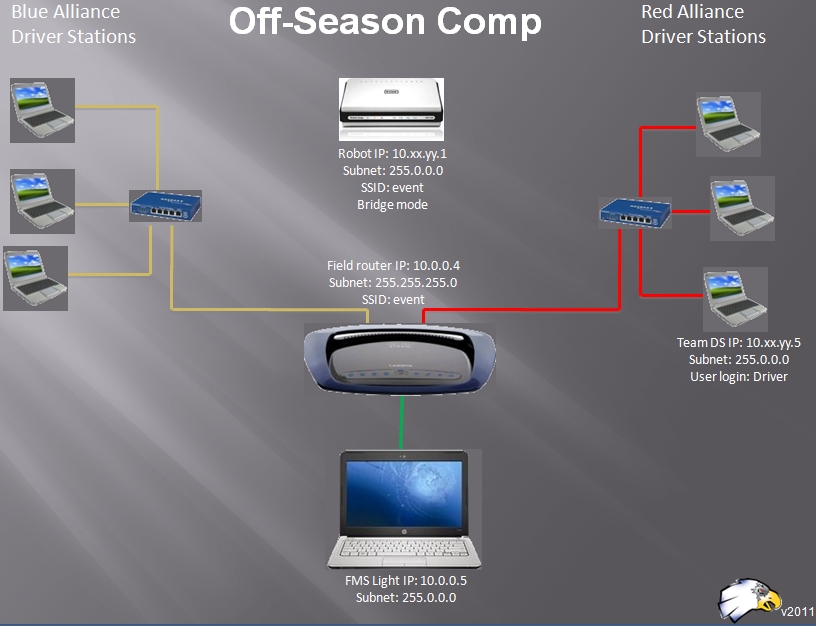
Home-grown Field & FMS
Here is one way to do this...

You can also eliminate the Ethernet switches and go wireless from the Driver Stations to whatever you use as the field router, as long as it's capable. Lean towards Ethernet cabling/switches to avoid potential connection issues with odd-ball laptops used by teams as Driver Stations.
Components:
- Your field can be:
- a FIRST official field without the electronics requiring the services of an official FTA
- Local-area field. e.g., The Midwest field coordinated by AndyMark or one of the District-system fields.
- NASA field - Mike Wade memorial field
- Build-it-yourself field courtesy of AndyMark
To control the robots you can use - FMS Lite Download - 2014 version Latest FMS Lite
- or Old FMS Light
- FMS Delta Software - a step up with more software requirements, this intermediate version includes match schedule generation, pit display, audience screen, etc.
- Matchmaker scheduler by Idle Loop Software Design (match scheduler details) can help randomize your matches, or for a small number of teams competing you can layout a match schedule on your own. The FIRST automatic match scheduler does not handle schedules with fewer than 18 teams. Small competition schedules would need to be done by hand.
Scoring would be manual using people designated as scorers.
Any game special electronic scoring will have to be worked around, possibly by relaxing or modifying the rules to make it easier on the referees.
The scores and rankings would have to be tracked with a home grown spreadsheet or database system. It would also be nice to have a projection or big screen display for participants to see how they stand.
Odds & ends
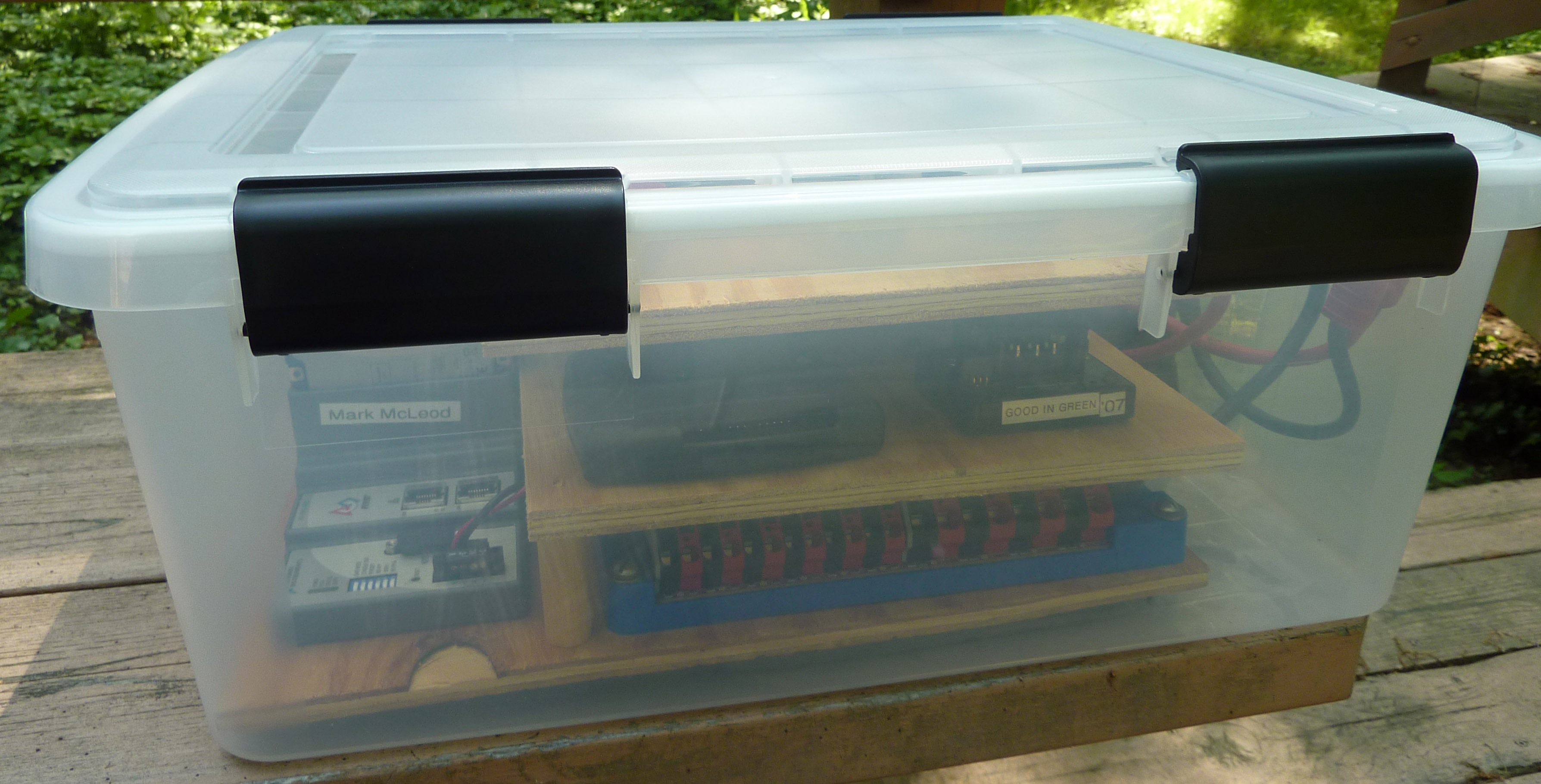
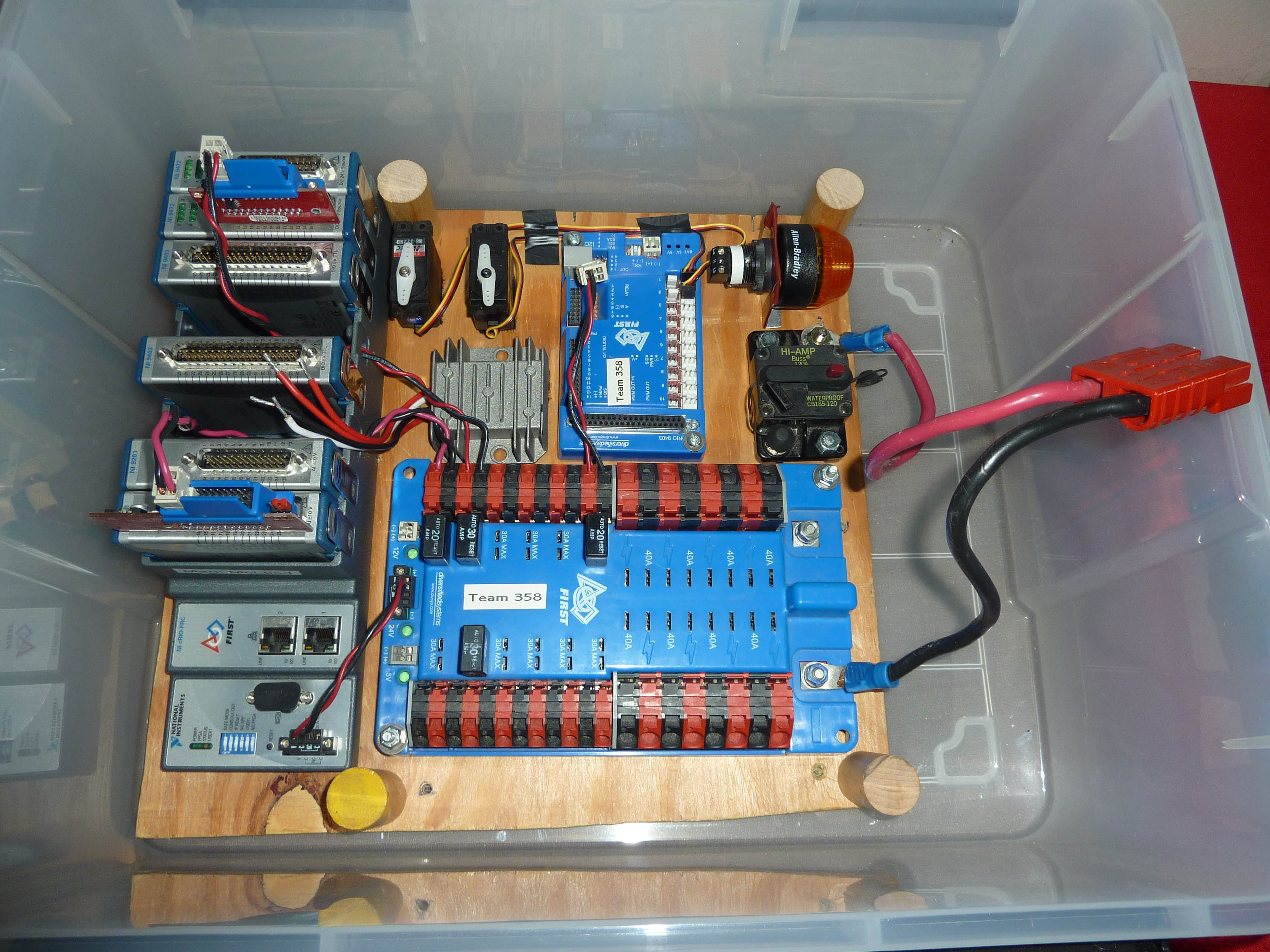
cRIO-in-a-box
This training control system is mounted in a waterproof case for transportation. It can be used as is, inside the case for programming training or the three layers can be removed and spread out for students & mentor of the electrical system. By spreading it out, many student trainees can gather around a large table to disassemble/reassemble the components as part of a robotics class. A smaller 12v 11Ah battery is used to make it lighter for hand carrying. The whole box can also be strapped to the top of a robot drive base and used that way.Wiring on and between boards is kept to a minimum and is not bundled in order to make it clear what-connects-to-what. In wiring lessons it all comes apart and goes back together without entanglement.
The system is mounted on a series of removable plywood layers, so each sub-sub-system can be separated and mounted on a working robot to drive around.
- Basic control system - cRIO, breakouts, Digital Sidecar, Power Distribution Panel
- Test Jaguars (PWM & CAN) and Victor speed controllers, Spike relay
- Sensors - gyro, accelerometer, quad encoder, potentiometer, reflective light sensor, webcam, etc.
The driver station travels separately but for training is only a laptop, an xbox controller and a small breakout for custom buttons & dials. It can be your competition driver station setup.
Typically, this gets used for basic control system wiring workshops, and speciality classes on just pneumatics or sensors or basic programming.

Get Microsoft Excel Viewer
Get Microsoft PowerPoint Viewer
Get WinZip