Upcoming Events:
Error 406 - Not Acceptable
Generally a 406 error is caused because a request has been blocked by Mod Security. If you believe that your request has been blocked by mistake please contact the web site owner.
Full event list
Error 406 - Not Acceptable
Generally a 406 error is caused because a request has been blocked by Mod Security. If you believe that your request has been blocked by mistake please contact the web site owner.
FIRST® Robotics Competition (FRC®)
FIRST® Robotics Competition (FRC®)
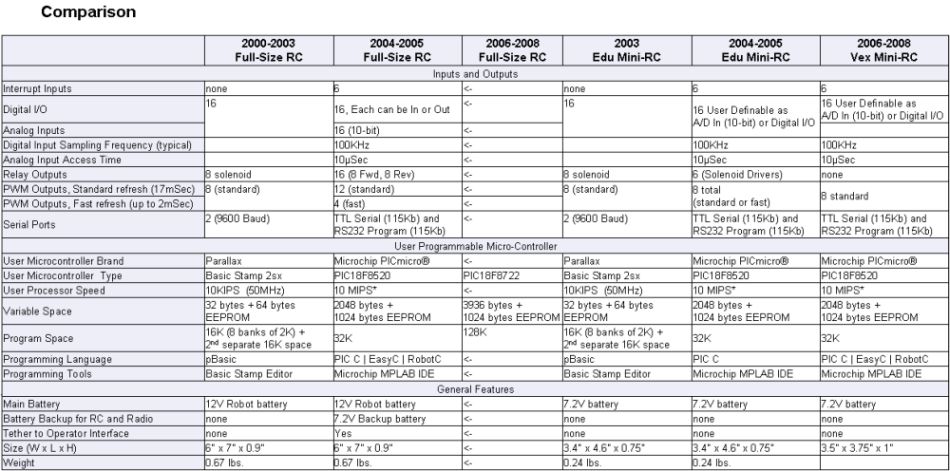
Edu/Vex Mini-Robot Platforms
These custom-made erector set-style mini-robot kits use smaller cheaper versions of the full-blown FIRST Robotics Competition 2004-2008 control system. The major operational difference is in the number and configuration of inputs & outputs, and the lack of an Operator Interface (OI) equivalent. Although the later model was designed to accept standard RC control commands from any third-party transmitter/receiver system. One of these was given to every FRC team in both Fall 2002 and 2003, and in 2004 only rookie teams received one.
EDU or Robovation - two different models were introduced:
- The pBasic version in the Fall of 2002


- the PIC version in Fall 2003
Sample code for both EDU and Vex
Sample code can be found in our Workshops area.Both systems can be used to drive a full-sized FRC robot. They will work just fine with victor speed controllers. Spike relays to control motors, air compressor, and solenoid valves are easily handled.
One note of programming interest is that the PIC-based systems have a "slow" loop, based on the frequency of radio packet transmissions, but the speed differs in each system. So if you chose to time events by counting slow loops you must account for the difference when counting and also change it if you port the code from one controller to another.
- Edu (pBasic) - no slow loop, but the main loop is in the 10s of seconds
- Edu (PIC) - 59 loops/sec
- Vex - 54 loops/sec
- FRC (2004-2008) - 38 loops/sec
Edu or Robovation
These educational robot systems were developed by IFI/FIRST and allowed teams to gain experience with the control system on a fully functional mini-robot platform.
Edu was later renamed to Robovation due to trademark infringement of a product in Europe by the same name.
The Edu kits came with the control system and parts (wheels, chain, servo motors, metal) to construct erector-set style robots roughlty one foot square.
Both models were programmed via a serial cable from a desktop or laptop computer in either pBasic (2003) or MPLAB/C (2004).
The first of these released by FIRST in the fall of 2002 for the 2003 season was based on the Parallax Basic Stamp and pBasic language.
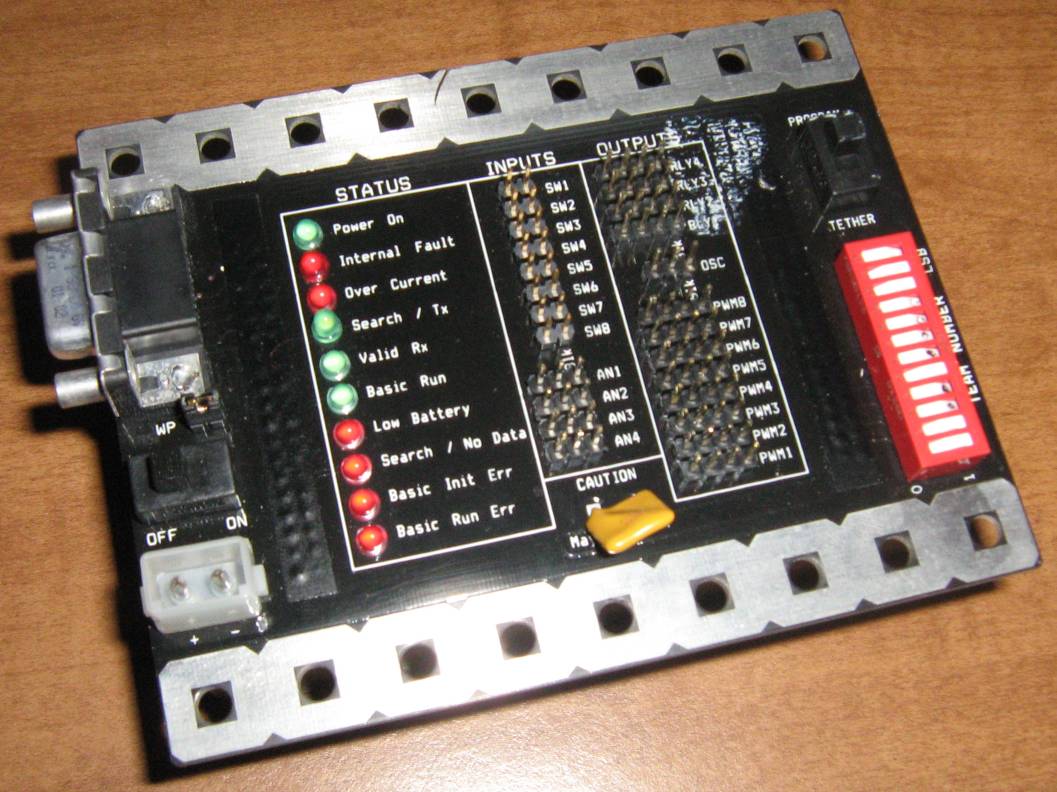
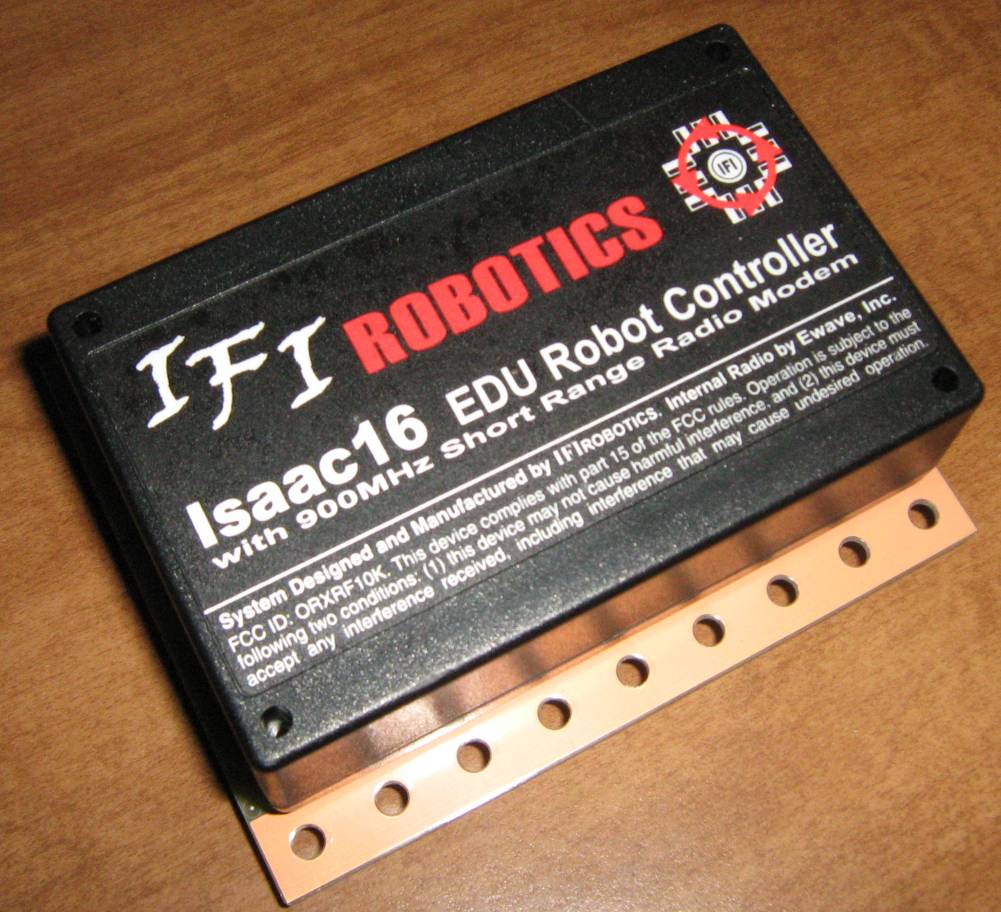
The second version was upgraded to be compatible with the new 2004 FRC control system based on the Microchip PIC 18F8520 processor. The two systems are roughly the same size and packaging (the pBasic Edu is ~3 times as thick so it resembles a block), however, the connectors are visibly different.
The Edu was radio controlled capable, in fact it provided inputs for two separate receivers, but you had to provide your own standard RC transmitter/receiver, or you could just run it autonomously.
- EDU Mechanical Guide
- Edu PIC version (2004-2005)
- Edu default code (02-16-2004, zip)
- Edu default software guide (10-15-2003, pdf)
- Mini RC Reference Guide (03-1-2004, pdf)
- 2004 Programming Reference Guide (04-12-2004, pdf)
- Mini TTL Port Test (10-03-2005, zip) A quick way to test the Edu TTL Serial Port
- Mini RC DDT Code (01-26-2005, zip) use with IFI Loader Dynamic Debug Tool only
- Edu master code ver3 (11-29-2005, zip)
- The power connector was either a set of spades or a Tyco Electronics (AMP), Mate-N-Lok, stocked by Mouser & Digikey
- 1-480318-0, Housing Plug (on 7.2v battery)
- 60617-1, Pin Female, 18-24AWG (on 7.2v battery)
- 1-480319-0, Housing Receptacle (on Edu board)
- 60618-1, Pin Male, 18-24AWG (on Edu board)
- Edu Basic Stamp version (2003)
- Mini RC System Quick Start Guide (pdf) How to connect and setup the Mini control system
- Mini RC Robot Controller Reference Guide (pdf) Detailed info on using and wiring to the Mini RC
- Mini RC Default Code Reference Guide (pdf) How the Default PBASIC code works
- Mini RC Default Code (PBASIC 2.5, bsx) Default Mini RC PBASIC 2 code
Get Microsoft Excel Viewer
Get Microsoft PowerPoint Viewer
Get WinZip